원본 기사 : https://www.aitimes.kr/news/articleView.html?idxno=24847
새로운 인공지능은 도로에서 다른 차량과 사람의 행동을 예측하고 대응한다 - 인공지능신문
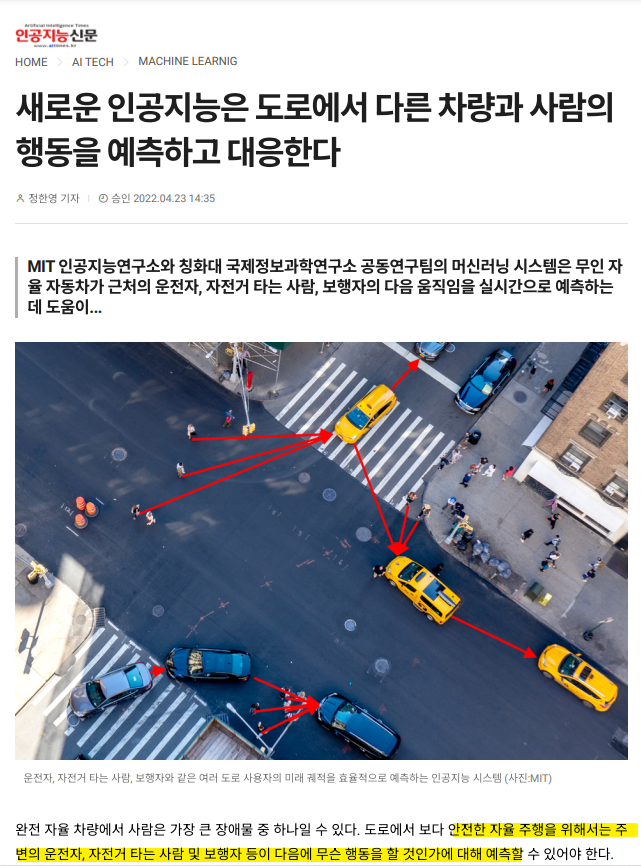
완전 자율 차량에서 사람은 가장 큰 장애물 중 하나일 수 있다. 도로에서 보다 안전한 자율 주행을 위해서는 주변의 운전자, 자전거 타는 사람 및 보행자 등이 다음에 무슨 행동을 할 것인가에
www.aitimes.kr




0. 기사 요약
자율주행을 위해, 도로위의 보행자 및 다른 운전자의 움직임을 예측하는 것은 매우 필수적이면서도 어려운 테스크이며, 일반적으로 모델이 각 개인의 움직임을 매우 단순하게 추측하는 문제가 생긴다.
이에 MIT 팀은 M2I를 개발, 이 모델은 도로 위의 여러 에이전트간의 상호작용을 개별적 관계로 분리하고, 이를 에이전트간의 관계설정 및 관계에 따른 확률 예측을 통해 간단하고도 정확성 높은 행동 예측 솔루션을 개발하였다.
1. 모델 구조
1) 입력 정보
- 상호작용하는 모든 에이전트를 개별적으로 인식.
- 상호작용하는 에이전트의 이전 이동궤적과 거리, 위치와 차선 등의 지도정보를 입력받음.
2) 관계 예측기
- 두 에이전트 중 어느 에이전트가 우선권을 갖는지 추론.
- 우선권을 갖는 통행자(Passing Agent) 와 양보자로 분류.
3) 주변 예측기
- 통행자 에이전트의 독립적인 행동을 기반으로 예상 궤적 추론.
4) 조건부 예측기
- 통행자 에이전트의 예상 궤적을 기반으로 양보자의 궤적 추론.
5) 계산
- 통행자와 양보자의 궤적 예측 및 확률 계산.
- 발생 가능성이 가장 높은 6개의 공동 결과를 최종 선택 .
6) 출력
- 사용자 에이전트가 8초간 어떻게 이동할지 예측. (ex 보행자가 이동할 때 까지 기다림)
7) 결과 분석
- 두 에이전트간의 상호작용을 확장하여, 여러 에이전트간의 상호작용을 고려한 궤적 예측 가능.
- 각 에이전트와의 관계 문제로 분리해 풀기 때문에 속도가 빠르고 정확하며, 사람이 이해하기 쉬움.
- 그러나, 에이전트간의 관계가 명확하지 않은 상황에서는, 위의 논리대로 설명 불가능함. (추후 연구)
3. 접근 방식
자율주행 관련지식이 부족했으나, 기사를 공부하고, Action Recognition Survey ("Human Action Recognition and Prediction: A Survey (2022)") 논문을 읽으면서 관련 이해도를 키울 수 있었다. action recognition 및 prediction은 곧 인간의 인식체계에 직접적인 영향을 받으며, 인식체계의 이해는 곧 행동에 대한 정의, 행동의 의도(목표), 행위자라는 복잡한 이해가 따른다.
또한 행동이란 것은, 독립적인 개인의 의도로 인해 변칙적으로 이루어지는 경우도 있지만, 사회속에서의 행동, 상호작용하는 object의 개입에 의한 변화도 있을 수 있다. 이에 따라 유사한 시계열 모형으로 예측하더라도, rolling-Unrolling을 활용한 LSTM의 복잡한 연결로도 풀 수 있고, 3D-CNN으로 축약된 local 정보를 LSTM과 연결해 이미지에서 얻어지는 피쳐벡터의 연속으로 해석할 수도 있었으며, social LSTM과 같이 사회적인 움직임을 정의해 다수의 움직임의 전체적인 흐름을 일괄적으로 예측할 수도 있었다.
소개된 M2I 모델 역시, 운전 상황을 단순 독립 개체들의 움직임으로 보는 것이 아닌, 이를 각 개체간 상호작용으로 보고, 다중 상호작용을 순서대로 예측하는 것으로 문제를 풀어갔다. 그리고 이런 방식은, 예시 영상을 봤을때, 굉장히 다양한 상황에 대한 일괄적으로 적용가능한 알고리즘이라고 생각한다.
4. 만약 내가 이런 문제를 풀게 된다면
나 역시 이를 각 개체의 상호작용으로 푸는것에 동의한다. 그러나, 직접 운전을 하는 입장에서, 다수 차량의 흐름, 즉 교통 역시 Social 정보를 반영한다고 생각한다. 실제로 현재 상용화된 자동운전 기능은 앞 차의 움직임에 따라 거리를 유지하며 최대한 그 흐름을 따라가는 식으로 개발되어 있다.
나라면, 교통의 흐름을 먼저 정의하고 에이전트들을 이 기준하에 분리한 이후, 각 에이전트의 상호작용 패턴을 정의하고, 이에 일괄적으로 적용가능한 솔루션을 찾는 과정을 거칠 것이다.
처음으로 교통의 흐름을 도심 교차로 상황으로 든다면, 에이전트의 분류를 선행차량 (교차로 또는 차량행렬에서 가장 선행하는 차량), 후행차량 (선행차량의 흐름과 유사하게 행동하는 차량), 개입차량 (차로에 진입하는 차량, 차선 변경을 시도하는 차량), 그리고 차선의 차량들과 독립적으로 작동하는 에이전트(보행자, 무단횡단하는 사람, 오토바이 및 자전거) 로 둘 것이다. 그렇다면 선행차량은, 교차로 내의 다양한 차량 및 독립 에이전트와의 상호작용만을 고려할 필요가 있고, 후행차량은 선행차량의 흐름을 자연스럽게 따르면서 개입차량 및 독립 에이전트와의 상호작용, 개입차량은 이 후행차량의 흐름에 자연스럽게 편승할 수 있는 안전하면서도 효율적인 동선을 고려하면 될 것이다.
그리고, 각 에이전트마다의 행동 우선 순위를 둘 것이다. 운전자의 시각에는 교통신호 및 보행자는 가장 높은 우선순위에 존재한다. 그러나 자율 주행의 입장에서는 상대적으로 이 문제들은 단순 정지나 움직임을 기다린다와 같이 굉장히 규칙적인 알고리즘으로 해결 가능하다고 생각한다. 반대로, 교통흐름 유지, 차선 유지, 방어운전과 같은 사항들은 상대적으로 사람이 다칠 위협은 적지만, 반대로 그 무엇보다 CV 분야가 필요한 분야이다. 이런 분야를 우선순위 및 필요성 순으로 정렬하여, 각 에이전트 분류마다 해결 우선순위를 결정한다면 내가 일괄적으로 해결해야할 상황이 조금 더 명확하게 분류될 것 같다.
'머신러닝 & 딥러닝 > AI & 데이터 기술 스크랩' 카테고리의 다른 글
| [스크랩] 빠르게 성장하는 디지털 헬스케어 인공지능 시장 (0) | 2023.08.28 |
|---|---|
| [스크랩] 키사이트 사라라 셀바 디렉터,"5G와 6G에서의 인공지능, 무선통신에 새로운 혁신 가져올 것!" (0) | 2023.08.25 |
| [스크랩] '인공지능 휴먼이 실시간 통역사로 나섰다!'...2초면 충분, 딥브레인AI ‘AI 통역사’ 출시 (0) | 2023.08.21 |
| [스크랩] 왜 이 뉴스 추천했지? 네이버가 답했다…'언론사 인기도' 추후공개 (0) | 2023.08.16 |
| [스크랩] 똑똑한인공지능,블랙박스영상으로교통사고누가잘못했는지과실비율로가려낸다! (0) | 2023.08.15 |